Lecture 25
- Lecture 25
- Shattering
- 3 kinds of classifiers
- threshold = decision stump
- interval classifier
-
reinforcement learning
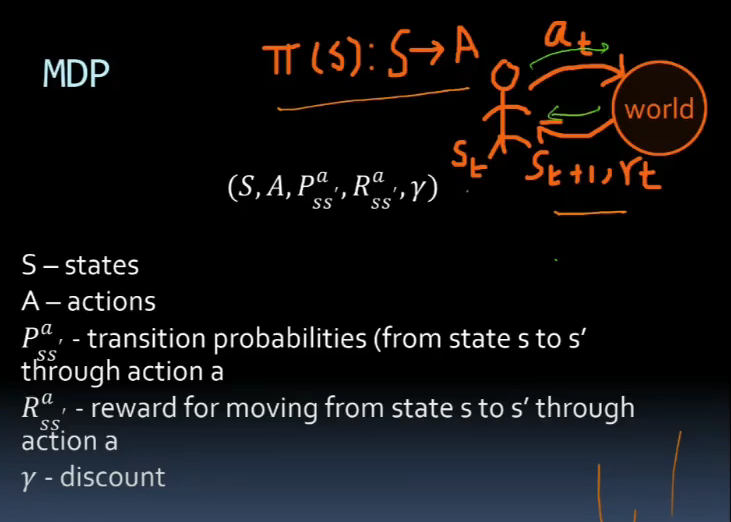
- MDP = MArkov decision process
- Exploration vs exploitation
- learning through interaction with environment
- eg chjild learning to walk
- do smth
- get feedback form env
- u r doing right or wrong
- take action
- action is given reward/penality
- state and action spaces
- how many states possible
- what actions
- episodic and continual tasks
- maze me hai, niukal aaya bahar = episodic task
- learning to walk = continual task
- continuous hai
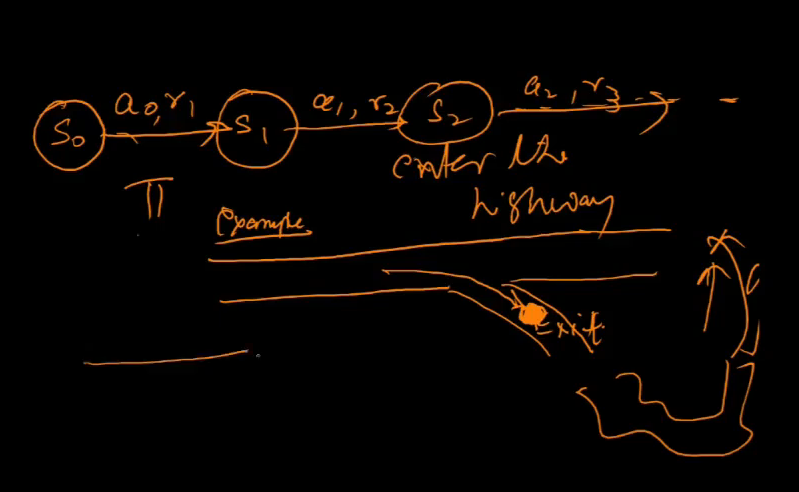
- reward and delayed reward
- delayed
- immediately nahi pata ki if a move taken will take u closer to goal or not
- i will get as resp is if a move was good or not jab opponent now takes move
- delayed
- policy
- mdp and smdp
- q-learning algo
Learning types
- supervised
- sample i/o pairs of fn to be learned r given
- teacher hai
- training data dia
- predict output minimizing some loss
- eg: regression, classiffication
- unsupervised
- only data points given(features only)
- find similar Xs
- clustering
- reinforcement
- agent acts on its environment
- rcvs evaluation of its action
- not told which one is correct to achieve goal
- training data: S,A,R
- develop an optimal policy(sequence of decision rules) for learner so as to maximize it s long-term reward
- eg robotics, board-games,etc
Sequence decision making problems
- i do not have to take single decision, but a sequence of decision
- like game play
- moves form a sequence of decisions
- that is what reinforcement learning is all about
Noisy movement
- say grid me hu
- can move in some dirns
- i assign probabilities of moving in some dirns
- dirns jaha movement prob is less, is noisy movement
- seq decision making is modelled as markov decision process
MDP
- Set of states, S
- set of Actions A
- transition prob Pss(a)
- state s me hu,take action a, move to s;, what is prob of this
- Reward Rss(a)
-
discount (Y)
- 9 elements ki grid hai
- bot could be in any one
- so 9 states
- Pss’(a)
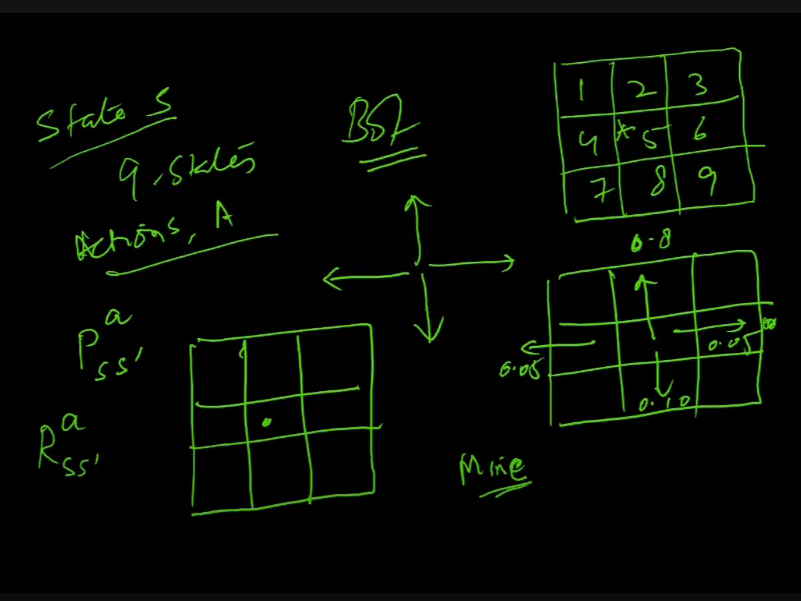
- discount factor
- 1 dollar hai aaj
- time ke saath iski value goes down
- this is concept of discount
- a dollar today is btr than tmrw
- policy
- what action u should take when u r in state s
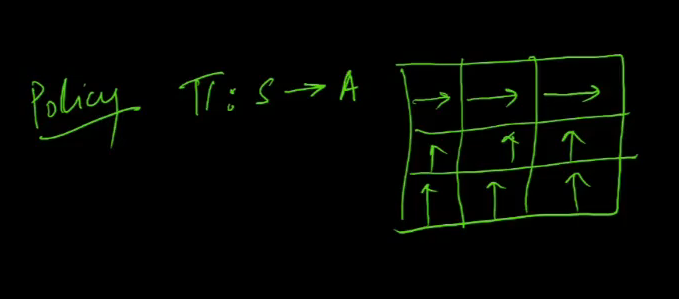
- agar top 3 me hu, i will move right, bakio me move top
- this is policy
- achi uya buri idk
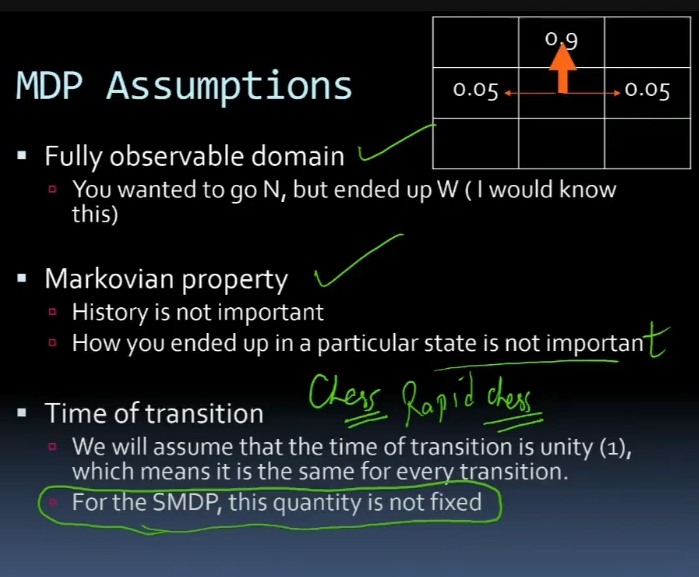
Assumptions of MDP
- fully observable domain
- although u want to move in one dirn(high prob), u move in some other, ik that, it is fully observable
- markovian property
- history is not important
- idc how u reached a state, imp is what u do next
- time of transition
- time take to decide is fixed
- for smdp, not fixed
- Rapid chess(fixed time to take a move) ke lie MDP use kar, normal chess ke lie SMDP
Examples of RL
- robotics
- how should robot behave to optimize its performance
- control theory
- how to automate the motion of a helicopter
MDP - contd
Elements of MDP
- state
- parameters describing system
- eg: coordinates of robot moving in room
- actions
- which dirn robot moves
- transition prob
- prob of going from state s to s’ under influence of ationm a
- 3 states and 2 actions => 9 probabilities
- immediate rewards
- +ve/-ve when system makes transition
- policy
- actions to be chosen
- Value function
- value of state or state-action pair is totl expected award starting form that state
MDP and Reinforcement
- RL is much more generic prob
- usme P and R are not known
- P and R can also change
Reinforcement Learning
Exploration vs Exploitation
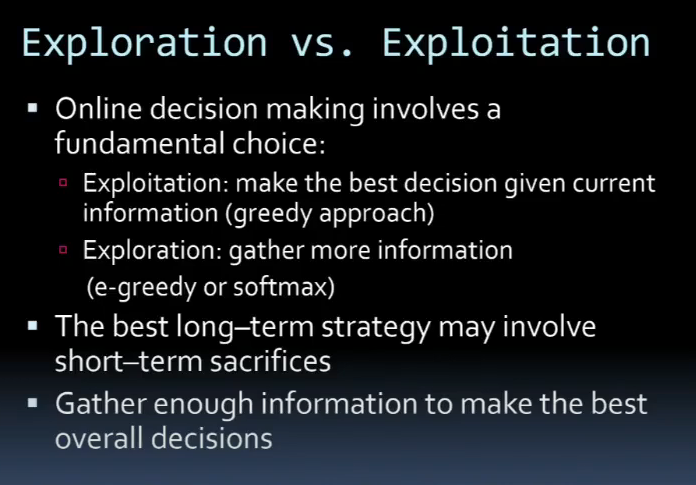
- epsilon greedy and softmax in Exploration