Semester7
Notes of courses done/attended in semester 7 in college
Lecture 26
State and action space
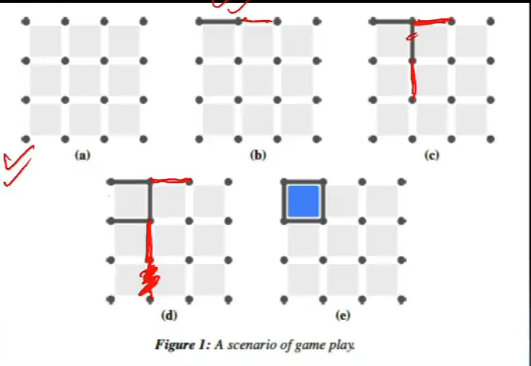
- Simple agent
- always makes same move independent of opponent
- Policy is: chooses min numbered line possible,
- pupose of this agent is to give Q-learning algo an easy and predicatable opponent to play aginst
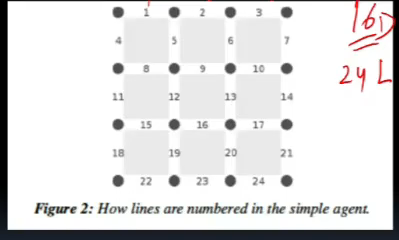
- state space size
- each line is unique and can be drawn or not
- 16 dots, 24 lines
- #states = 2^24
- game can be in any one of these states
- State action pairs
- mean #lines possible to draw in each state = 12
- #state action pairs = 2^24*12 = 200mn
- reward
- +ve or -ve reward only when game ends and also when a box is completed
- reward for winning must be far greater than that for completing a box
- likewise punishment for losing a game needs to be more sever than losing a box
Strategies for action selection
- greedy approach
- epsilon greedy
- exploiration part comes in
- pick greedy most of times
- softmax
- mostly max but with prob proportional to values u pick others
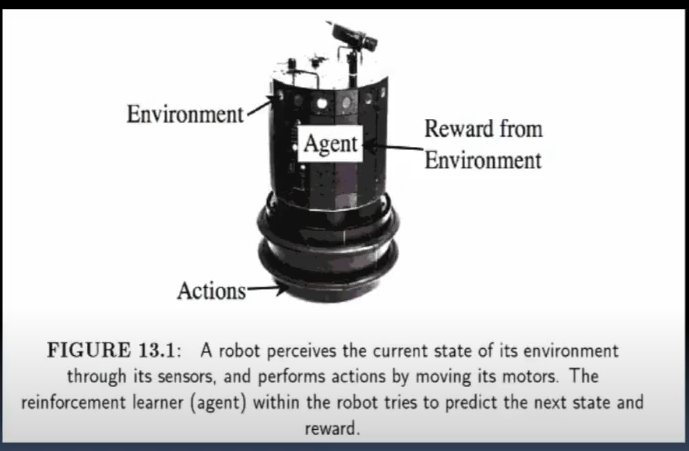
Reinforcement LEarning
- sequence of actions == sequence of decisions taken
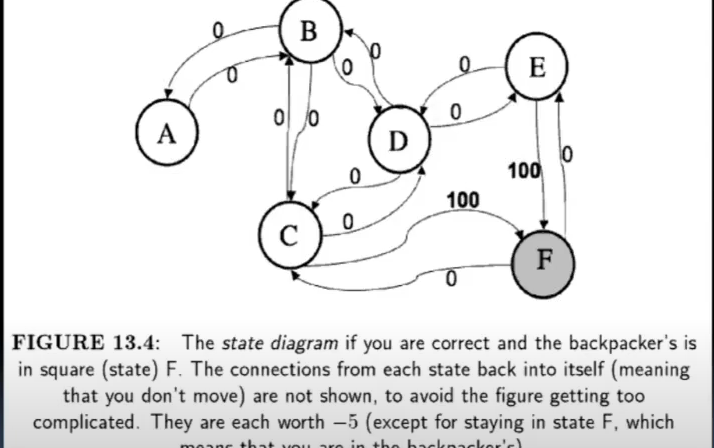
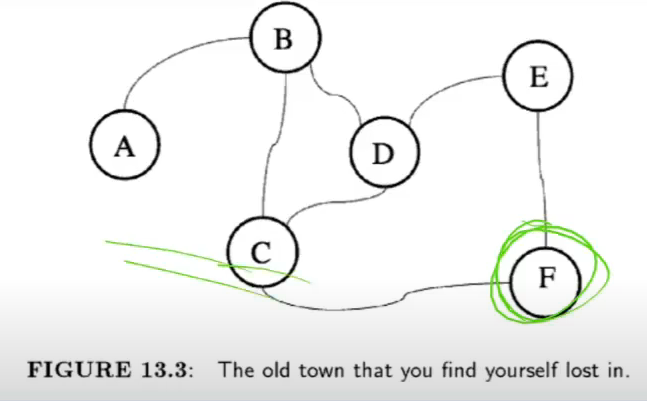
Getting Lost
- RL can help in this situation
- policy is eat chips only when u take action that lead to BnB
- bad policy?
- risk dkehne pe hai
- if I eat, i will be sleepy
- if i do not, then strength nahi
- actions, rewards?
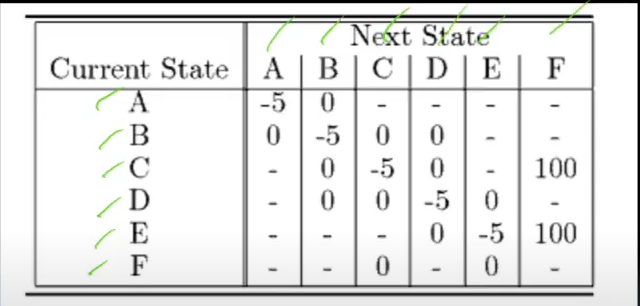
- do not stay still (reward of -5 which means u pinch urself if u stay sleepy)
- F is called absorbing state (reward urself by eating all chips)
- moving b/w 2 squares could b good as it might be taking u closer to F, buyt u wouldn’t know unless u refer to map
- so u deciode to reqard only after reaching F
- all other actionos r neutral
- when no direct road b/w 2 squares - no reward as it is not a viable action
- reward matrix
- As a reinforcement learner, u don’t know reqward matrix
- this is what u r trying to discover