Lecture 6
Video
Agents
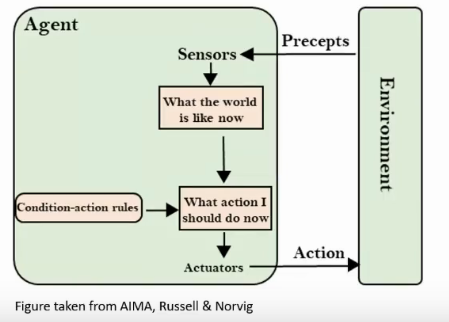
Simple reflex Agent
- non-perceptual part = data that cannot be obtained from sensor?
- if vaccum cleaner me temp sensor nahi hai, it can’t find temp, and agar temp high ho, then it might not be able to work
Model Based Reflex Agent
- partially observable?
- eg vaccum cleaner me I only know about current cell ki dirty hai ya nahi, neighbors ka idk
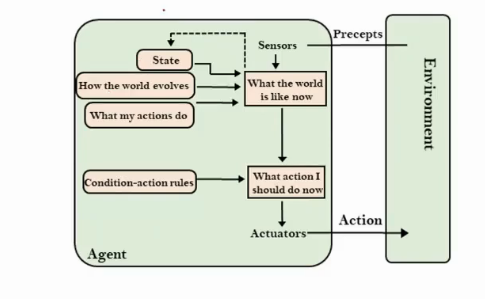
- it has better understanding of the world
Goal Based agent
- goal = clean all the tiles
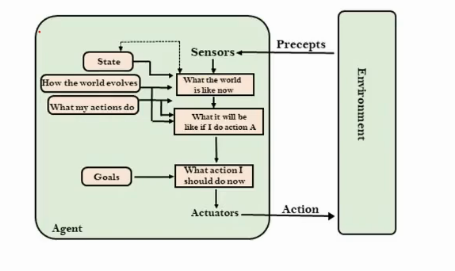
- there are no rules now
- we check if taking an action takes me closer to goal or not
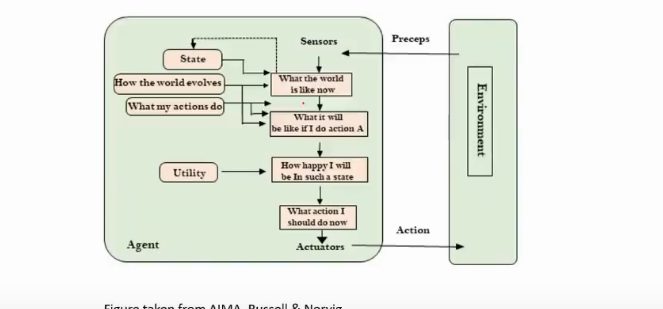
Utility Based Agent
- main diff is in terms of optimization
- like what is shortest path to reach the destination
-
goal based, onnly focused on goal, did not care about the time it took
- dekh 3 selectio strategies thi na
- greedy
- epsilon-greedy
- softmax
- so this will check ki kaunsa lu
Learning Agent
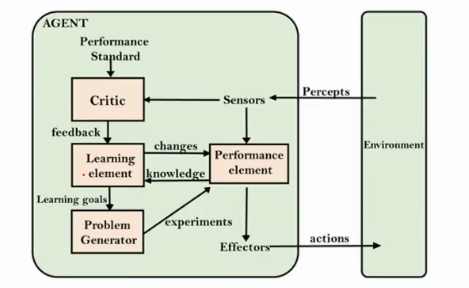
- Can it generalize
- if it has learnt to recognize obj a, can it generalize to recognize obj b
- neural n/w me bhi mistake se learn
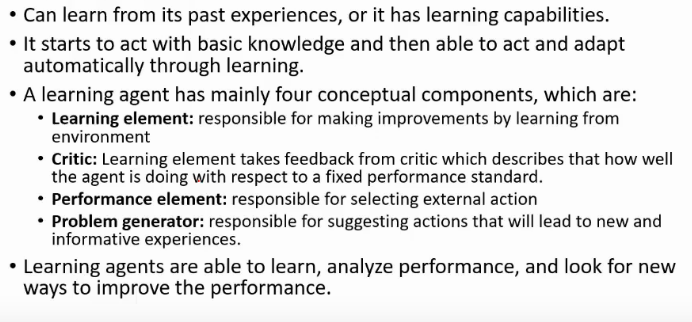
- it is like supervised learning
PEAS Representaiton model
Self Driving Car
