Lecture 4
Lecturer - Bijoy Krishna Mukherjee
Lecture plan
- module 1
- nontraditional optimization
- 6 lecs
- module 2
- fuzzy logic
- 9 lecs
Books
- red = module 1
Topics to be covered
- intro to traditional optimization - 2 lecs
- nontraditional optimization - Genetical aversion - 3L
- nontraditional optimization - PSO - 1L
Introduction
- method to find the best solution out of several feasible solutions
- first step is to express the criteria to judge the goodness of a solution as a function of factors wich influence the chosen criteria
- this is known as objective function
- Mathematically
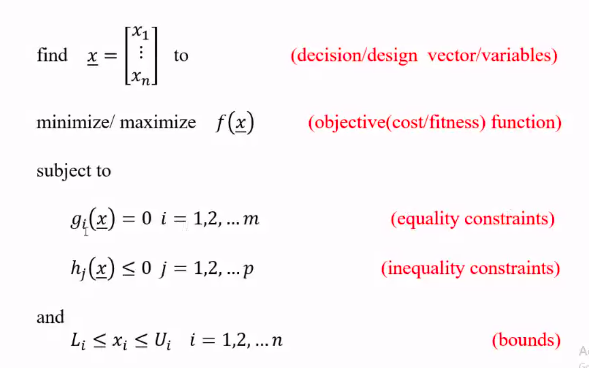
- bounds => we are confining search space
Various types of optimization problems
- unconstrained and constrained
- single and multiobjective
- single objective function vs multiple
- static and dynamic
- dynamic => differential equations are involved
- static => all are algebraic equations
- linear programming and non-linear programming
- integer programming and real valued programming
- we will consider bold ones in course
Traditional and nontraditional or metaheuristic techniques
- traditional
- based on pure mathematics
- yields precise solutions
- may not be suitable to solve complex real-world problems
- they both complement each other
- nontraditional try to solve acceptable soln quickly, maybe not accurate
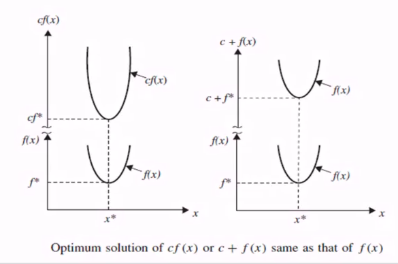
- maximization problems can be converted to minimization problems by modifying obj functions as
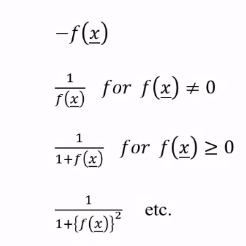
- following operations on the objective function will noe change optimum soln x*
- multiplication/division of f(x) by a +ve const c
- addition/subtr a const c from f(x)
Some applications of optimization
- almost all fields where numerical info is processed(science, engg, math, eco, commerce)
- relevant where technical or managerial decision making is involved or a trade-off is involved
- engg design applns usually have constraints since the variables cannot take arbitrary values and usually we want to minimize/maximize something
- eg designing a bridge, engg want to minimize cost while maintaining a certain min strength for the structure
- Control and signal processing applications (e.g. Kalman filter)
- many other probs can be cast as optimization problems
- eg root finding, soln of overdetermined/underdetermined linear system of equations
- Root Finding
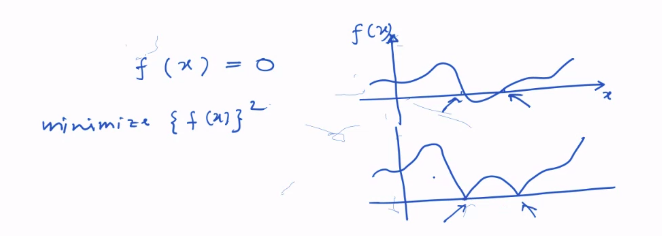
- squaring f(x) made roots as min valued points
- soln of overdetermined/underdetermined linear system of equations
- overdetermined - we have more equations and less number of unknowns
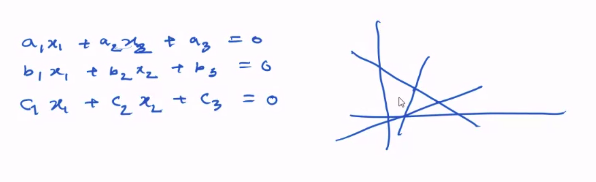
- 3 eqns, 2 unknowns
- from graph, no soln
- so koi aisa point lia jo 2 ke intersection pe hai, so 3rd wala error dega, square and get sum total error
- find a point which has least error - LEAST Square Error solution
- write it as AX = B
-
and minimize 2 norm AX-B - soln can be found by pseudo inverse
- X = (A’A)inv AB, A’ = A transpose
- underdetermined
- less equations and more unknowns
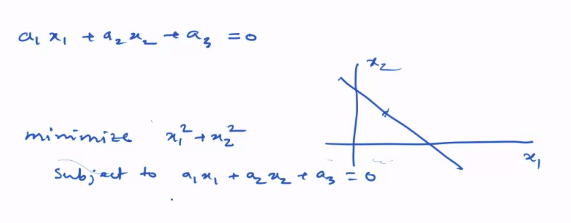
- solution again by pseudoinverse

- this is least energy solution
- we need to find a point on line which is closest to origin
- less equations and more unknowns
- overdetermined - we have more equations and less number of unknowns
- Root Finding
- eg root finding, soln of overdetermined/underdetermined linear system of equations
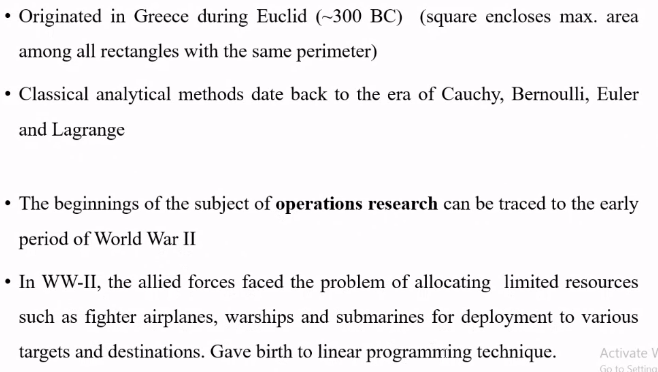
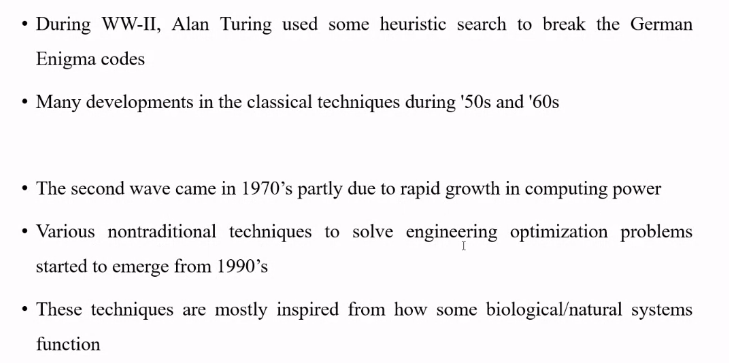
A bit of history
Analytical method - unconstrained case
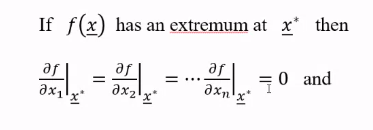
- all partial derivatives at extremum are zero
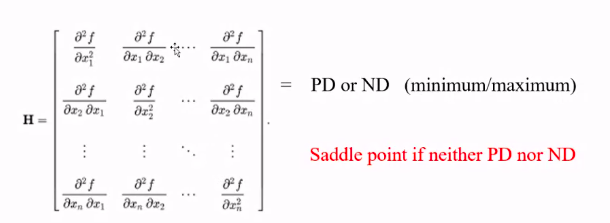
- whether it’s max or min, will be given by second order - matrix is
- it is multivariate extension of what we did in +2
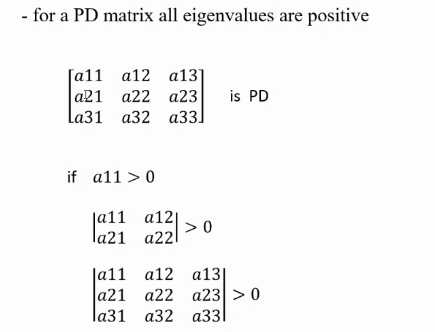
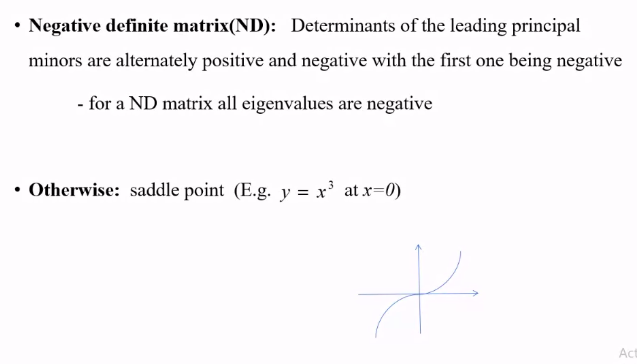
- Positive definite matrix
- determinants of leading principal minors are all positive
- Negative definite matrix
Analytical method - constrained case
- lagrange multiplier method
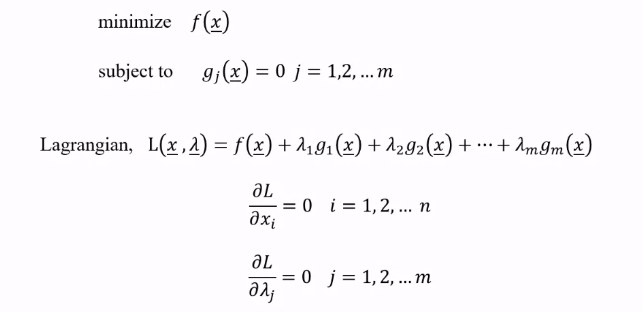
- converted equality constrained problem to unconstrained problem